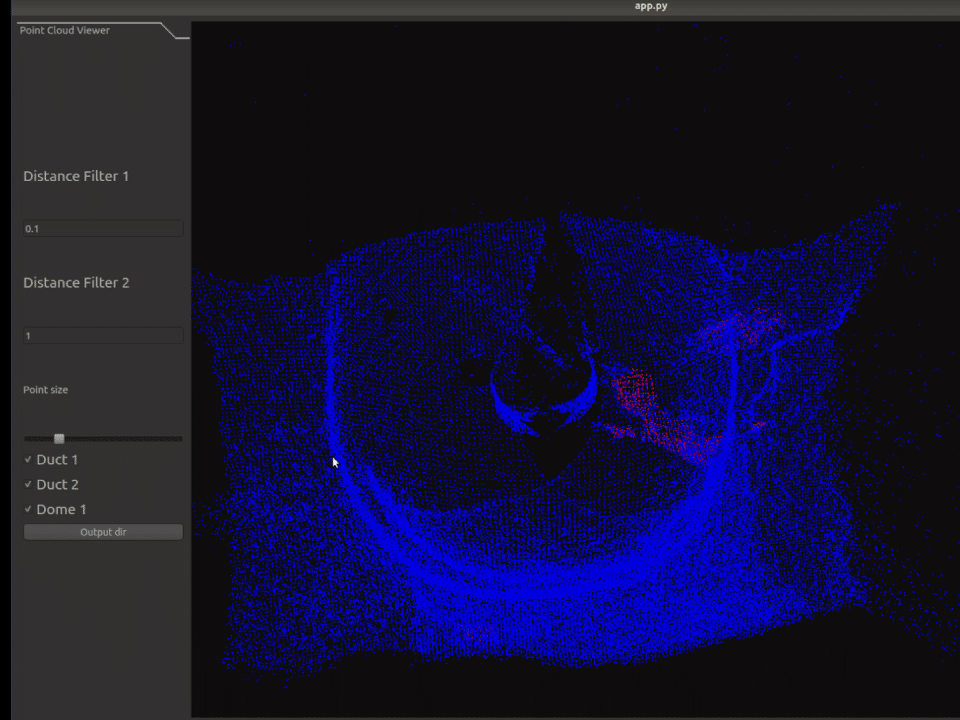
Usamos sensores LIDAR na escavadora para gerar uma nuvem de pontos (Point Cloud). O nosso principal objetivo no projeto foi desenvolver um novo algoritmo que fizesse criasse e realizasse a interpretação dessa leitura para fazer a escavação ser ajustada rapidamente e durante o processo.
Após vários testes usando ferramentas de visão computacional, nossa equipe desenvolveu com sucesso o novo algoritmo baseado em estatística e álgebra linear que identifica anomalias durante o processo de escavação. Além disso, desenvolvemos um novo software para receber novos dados dos sensores utilizando Ros para comunicação.
Depois disso, construímos um software desktop para visualizar em tempo real a nuvem de pontos e o defeito usando Python e outro para visualizar em 2D (um mapa de profundidade) desta mesma nuvem.